
Raspberry Pi y sensores IMU
Volvemos con la Raspberry Pi y vamos a ver como poder añadir sensores adicionales a la misma. Concretamente, vamos a añadir un IMU , que conectado por I2C y por menos de 4 euros, nos va a permitir controlar aspectos de nuestro barco como pueden ser la escora, el asiento o el rumbo.
Esto es la base para poder construir un piloto automático para nuestro barco, pero también para optimizar el rendimiento, velocidad y consumo de combustible. Aprenderemos sobre los conceptos de escora y asiento y como estos influyen en el rendimiento, y haremos un pequeño esquema con NodeRED para poder monitorizar estos factores y buscar el punto óptimo de rendimiento para nuestro barco. Todo aquí en: The Low Cost Sailor
Algunos videos que os puede ser útil repasar:
✅ EP11 – El de la Raspberry https://youtu.be/oqOyNPMbu5o
✅ EP22 – El del panel de interruptores WiFi https://youtu.be/gdB2Zn-vVw0
✅ EP48 – El del portátil viejo https://youtu.be/N6zsLNhyhv8
✅ EP51 – El de introducción a Node-RED https://youtu.be/BVBYoBYRZNs
Material necesario y que aparece en este video:
✅ El famoso IMU
🔶 En AliExpress 4€:
🔵 https://s.click.aliexpress.com/e/_Dk7BpTb
🔶 En Amazon 10€:
🔵 https://amzn.to/3I3MqY4
✅ Ladrillo de prototipos
🔶 En AliExpress:
🔵 https://s.click.aliexpress.com/e/_DBW7Alr
🔶 En Amazon:
🔵
✅ Ladrillo de prototipos
🔶 En AliExpress:
🔵 https://s.click.aliexpress.com/e/_DBW7Alr
🔶 En Amazon:
🔵 https://amzn.to/48jMH3G
✅ La versión analógica para medir la escora
🔶 En AliExpress 4€:
🔵 https://s.click.aliexpress.com/e/_DkQC4PB
🔶 En Amazon 6€:
🔵 https://amzn.to/49cQSzs
✅ Un nivel bien barato, por si no queréis complicaros tanto, como el que uso yo para ver si el barco está recto, o incluso con el láser comprobar que el mástil está recto..
🔶 En AliExpress:
🔵 https://s.click.aliexpress.com/e/_DEAL1k5
🔶 En Amazon:
🔵 https://amzn.to/3OLs6y8
✅ Raspberry Pi
🔶 En AliExpress :
🔵 https://s.click.aliexpress.com/e/_Dd5Wuj7
🔶 En Amazon :
🔵 https://amzn.to/3T0dzBj
https://amzn.to/48jMH3G
✅ La versión analógica para medir la escora
🔶 En AliExpress 4€:
🔵 https://s.click.aliexpress.com/e/_DkQC4PB
🔶 En Amazon 6€:
🔵 https://amzn.to/49cQSzs
✅ Un nivel bien barato, por si no queréis complicaros tanto, como el que uso yo para ver si el barco está recto, o incluso con el láser comprobar que el mástil está recto..
🔶 En AliExpress:
🔵 https://s.click.aliexpress.com/e/_DEAL1k5
🔶 En Amazon:
🔵 https://amzn.to/3OLs6y8
✅ Raspberry Pi
🔶 En AliExpress :
🔵 https://s.click.aliexpress.com/e/_Dd5Wuj7
🔶 En Amazon :
🔵 https://amzn.to/3T0dzBj
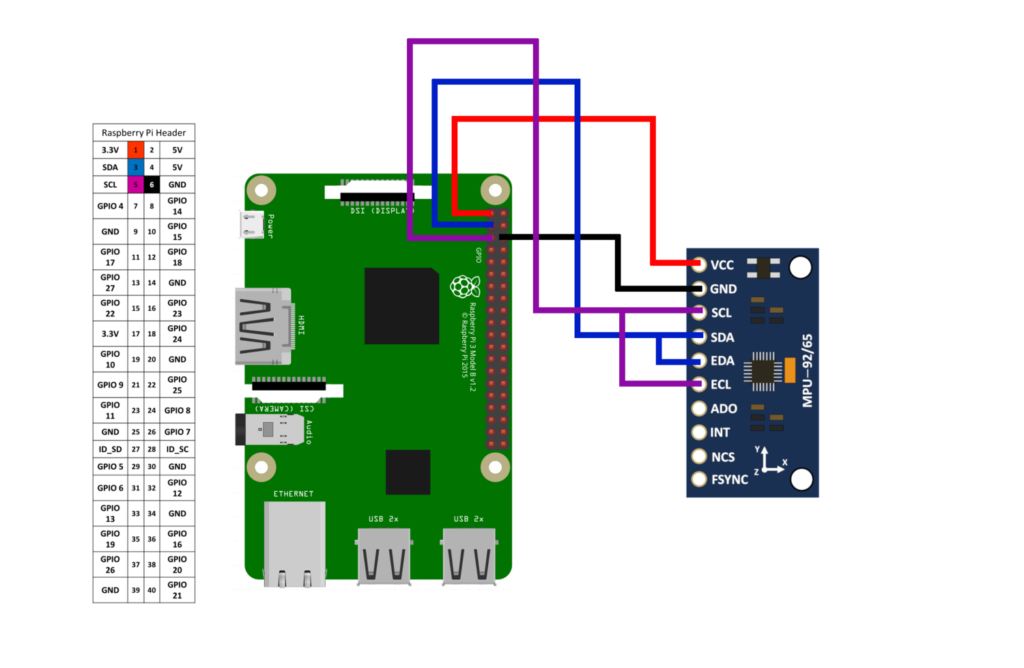
En cuanto a la información importante, aquí tenéis el esquema de conexiones, varía ligeramente respecto a lo que cuento en el video:
Para explotar los datos aquí tenéis unos ejemplos de esquemas en node RED, que además podéis importar:
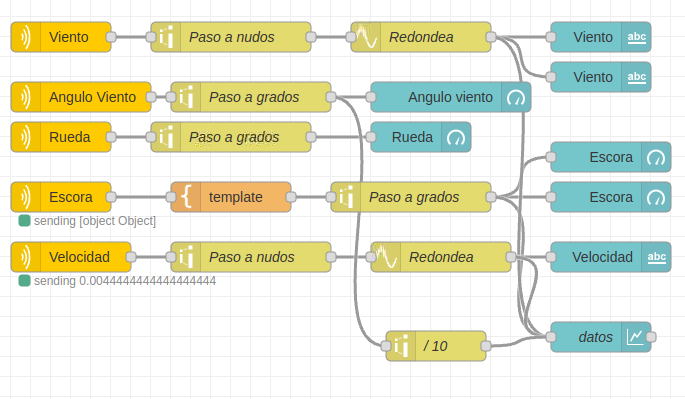
Os dejo el diagrama con el que podéis obtener esto en Node RED aquí.
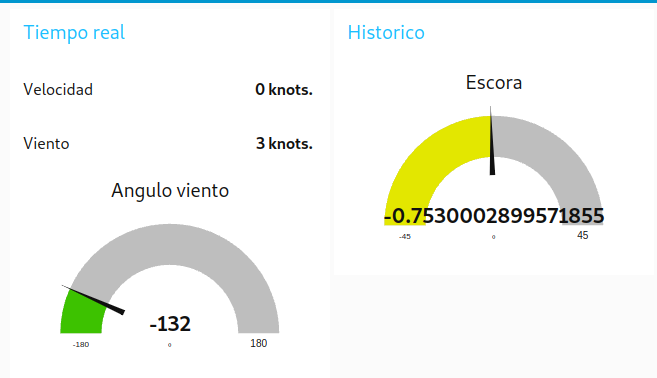
Esta es la versión sencilla que muestra todos los datos en el dashboard, pero de regalo, os muestro el diagrama que permite también guardar todos los datos en un CSV para poder analizarlos después, es decir que convierte a la raspberry pi en un datalogger.
Básicamente, le añado a el dashboard un interruptor que permite activar o desactivar la gravación de los datos a CSV. Junta todos los datos interesantes del signalK, los sincroniza y guarda sus valores cada 5 segundos en el fichero CSV en la carpeta documents de vuestra raspberry. Este fichero lo podéis después abrir con Excel o google sheets para analizar todos los datos de vuestras navegaciones.

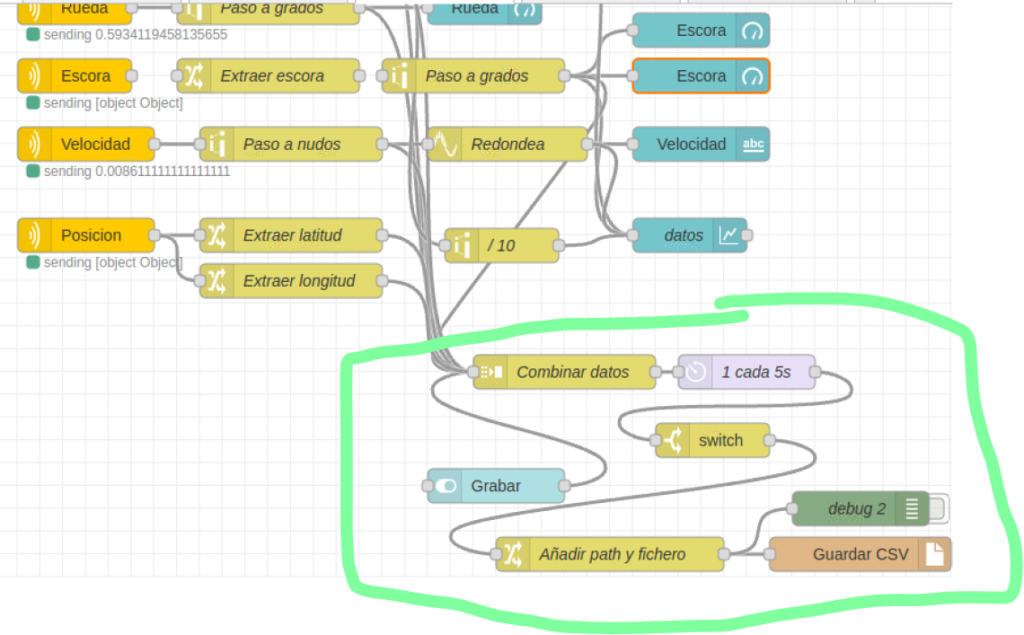
El flujo completo para esta opción lo podéis descargar aquí.